ダイナミックシステム理論とは?
ダイナミックシステム理論は、物理学や生物学、化学、数学にまたがる多分野的な理論で、ヒトの運動制御を非線形で適応的なシステムとして捉える枠組みです。
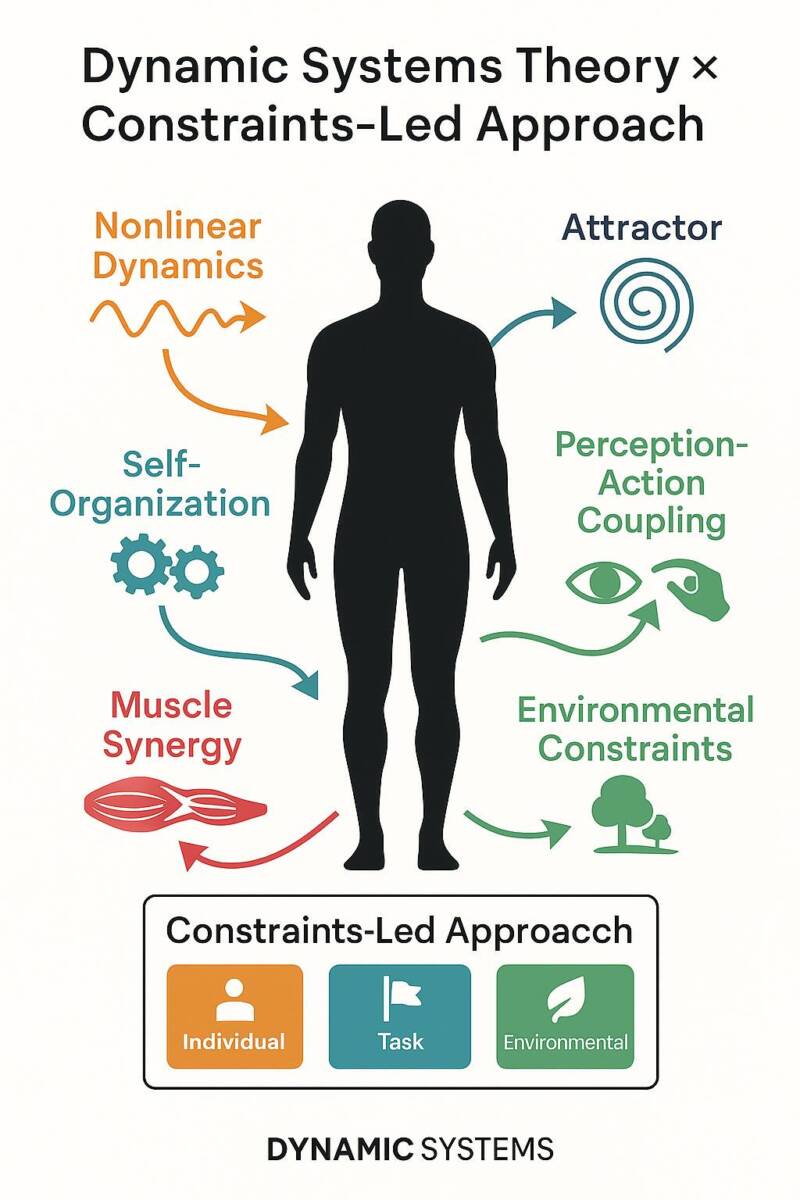
非線形ダイナミクス
システムの変化が直線的ではなく、ある閾値を超えると急激な変化が起きる性質を指します。たとえば、歩行から走行への切り替えなどが該当します。
安定性とアトラクター
システムが安定した状態(アトラクター)に戻ろうとする傾向。ウォーキングやランニングといった運動様式もアトラクターの例です。
秩序変数と制御変数
秩序変数(例:相対位相)は運動全体のパターンを定義し、制御変数(例:速度)はそのパターンの変化を引き起こすトリガーになります。
自己組織化
動きが指示されずとも、制約や環境に応じて自然に形成される現象です。走行への自然な切り替えなどが例です。
協調構造(筋シナジー)
筋肉と関節が機能的なグループとして協調することで、運動制御の自由度の問題を効率的に解決します。
知覚-行動連関
視覚や聴覚などの知覚と、手足の運動の連動によって目的動作を可能にするプロセスです。
制約主導型アプローチ(CLA)とは?
CLAは、ダイナミカルシステム理論を実践に落とし込むためのコーチング戦略です。以下の3種類の制約を操作することで、学習者の自己組織化を促します。
- 個人制約: 身体構造、疲労、柔軟性、動機など
- 課題制約: ルール、道具、人数、ゴールなど
- 環境制約: 気温、風、摩擦などの外的要因
CLAでは、コーチは「教える」のではなく、制約を設計することで「気づかせる」役割を果たします。これにより、アスリートは自らの動作のパターンを探求・修正し、より効率的かつ安全な運動様式を獲得していきます。
CLAの4つの機能
- ① 非効率な動作を不安定化
- ② 探求と自己組織化を促進
- ③ 情報の増幅とアフォーダンスの誘発
- ④ フィードバックの提供
CLAの実践例
バットスピード向上のための制約操作
長尺バットを用いて逆方向へ打つなど、通常の動作では成功しない課題を与えることで、非効率な動作から脱却を促します。
投球フォーム改善のための物理的制約
脇にボールを挟み、フォームの逸脱を視覚的・体性感覚的にフィードバックとして返すことで、新たな協調構造の構築を促進します。
CLAの利点
- 適応力の向上
- 個性と創造性の尊重
- 内発的動機と自律性の育成
- 怪我の予防と可動パターンの多様化
- トレーニングの効率化
- 暗黙的学習と外的焦点
- 実戦への正の転移
効果的な制約設計のヒント
- 物理的制約の活用(コネクションボールなど)
- 複数制約の収束による誘導
- エラー増幅による自己修正
- 個人特性に基づいた制約設計
- ウェイトトレーニングとの連携
まとめ
ダイナミカルシステム理論は「なぜその動作が生まれるのか」、CLAは「どう指導・適応させるか」という視点を提供します。両者を組み合わせることで、アスリートは変化に強く、自律的に進化する運動能力を獲得できます。

コメント